Sistema di manipolazione delle bistecche

Obiettivo
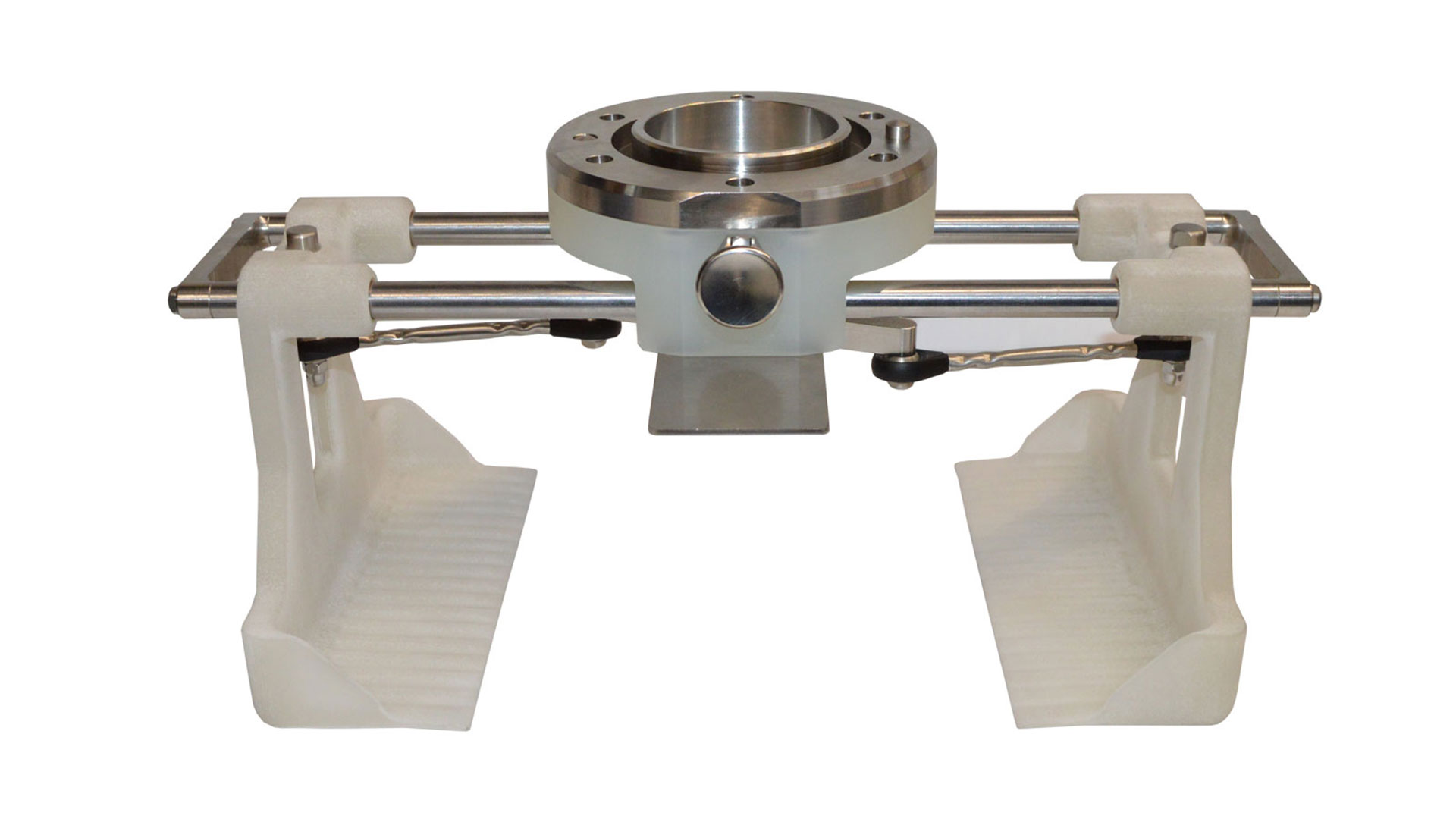
Movimentazione di prodotti grezzi dal nastro trasportatore all'imballaggio. Poiché la pinza non ha un proprio azionamento, viene controllata tramite un asse rotante integrato nel Flexpicker.
Soluzione
La soluzione risiede in un design dei componenti compatibile con gli alimenti. Inoltre, è stata creata un'interfaccia diretta tra l'asse rotante del robot e la cinematica della pinza.
Highlights e dati tecnici
 Azionamento del servomotore CA
Azionamento del servomotore CA Presa esterna
Presa esterna
Dati tecnici
| Tipo di alimentazione | elettrico |
| Progetto pinza | FORM |
| Corsa max. | 177 [mm] |
| Peso del sistema | 2.5 [kg] |